Robotic Psychology Coach
Project information
- Category: Research Project
- Project date: 2018-2019
- GitHub repo is coming soon...
- University of Cambridge - AFAR Lab
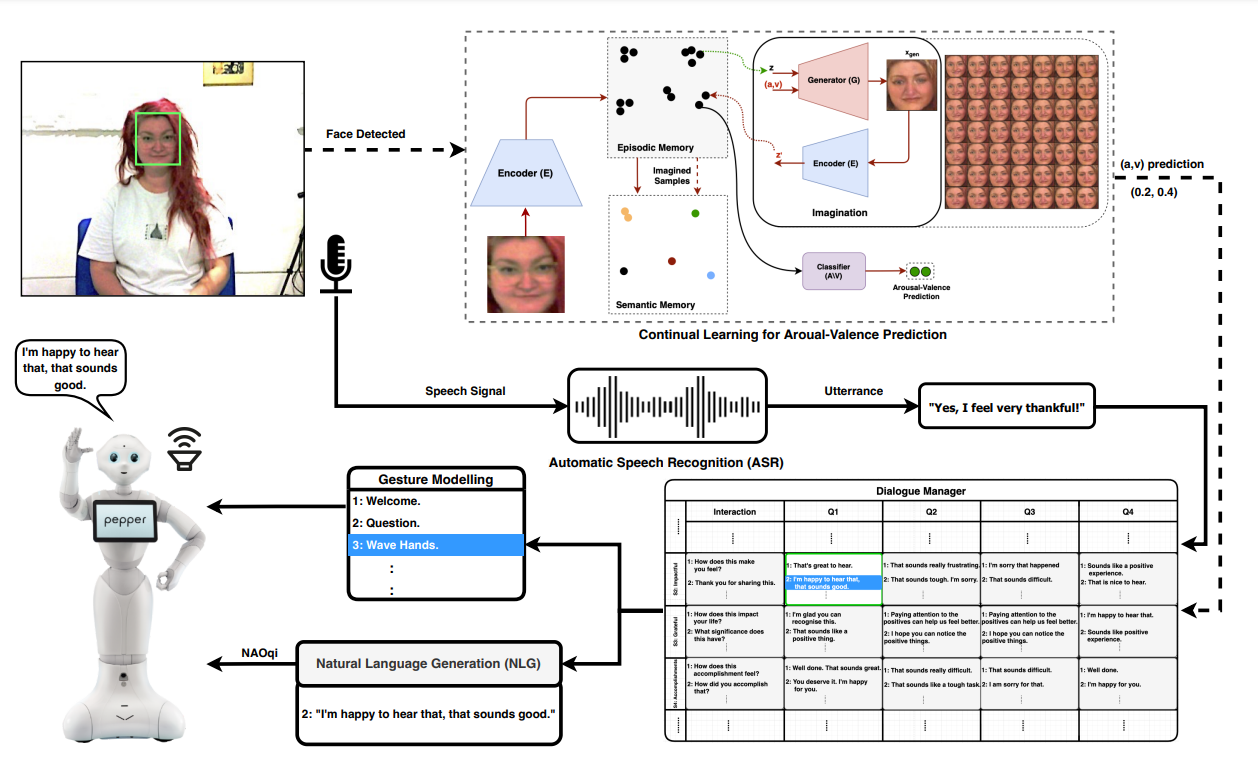
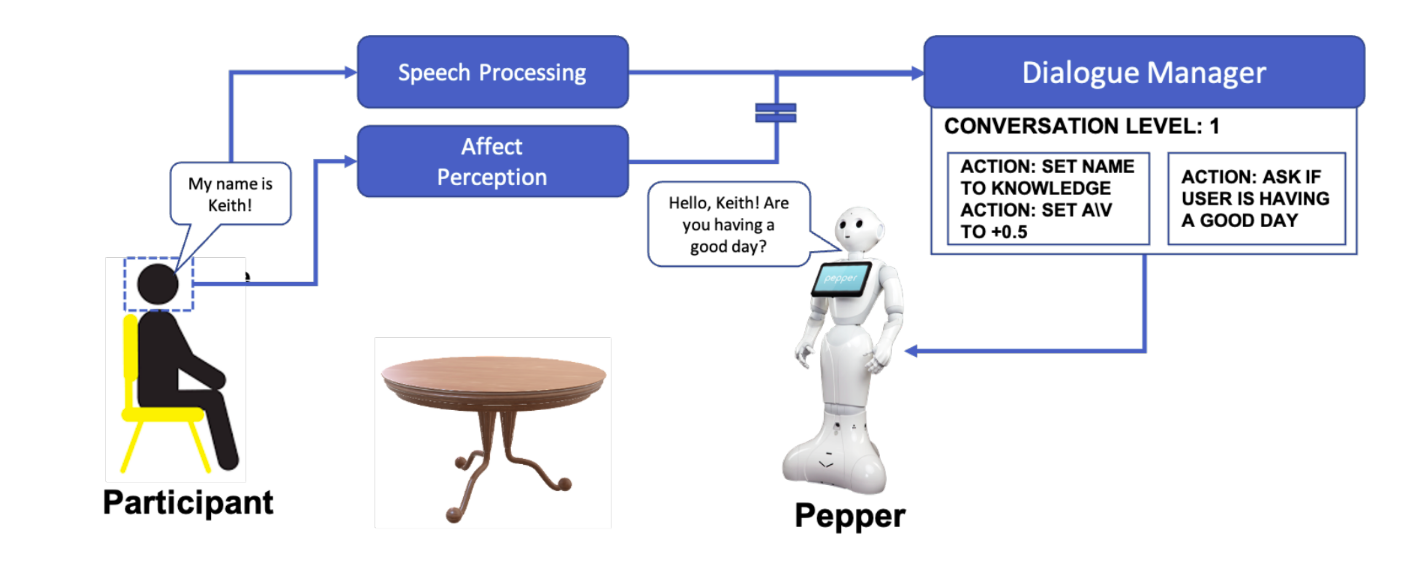
In this project, Continual Learning (Lifelong Learning) is used for the personalization of the facial expressions. For the experiments, Pepper Robot is used as a psychology coach. The robot was able to perform a long dialogue with the user and to consider the user's facial expressions with their answers, and to produce an answer with this knowledge. Continual learning is used to learn the facial expressions of the user specific to that user, on the fly. Hence, it was able to adapt to the facial gestures of each user separately by personalization. Some of my contributions are as follows:
- • ROS based experiment environment for the Pepper robot that can work both with the Choregraphe simulation and the real robot
- • The “Smach” library of ROS is used to implement a state machine logic to manage the states of the robot for the dialogues with the user
- • Pepper Robot’s camera frames are used to feed the Continual Learning model
- • Custom logging module that works with ROS successfully. It was saving the workflow of the program along with the unprocessed and processed images.
- • Google’s speech-to-text API is used to convert the user’s answer into a text format to be processed. For the robot’s speech, Google’s text-to-speech API is used in the simulation, and NAOqi’s own text-to-speech service in the real physical robot.